Tesla Full Self Driving Beta Update 10.69.1.1 — Nice, Occupancy Network, Improvements, and Price Hike
Tesla has updated their Full Self Driving Beta V10.69.1.1; new price hike, improved unprotected left turns, and new occupancy network architecture.

Tesla's Full Self Driving(FSD) has been in and out of the news cycles since its ambitious inception. Most recently is due to the recent flurry of price increases. When originally offered, FSD had a starting price of $8,000, but has since increased exponentially. With update 10.69 Musk warned that with the wider rollout of FSD Beta 10.69 the price would increase to upwards of $15,000.
After wide release of FSD Beta 10.69.2, price of FSD will rise to $15k in North America on September 5th.
— Elon Musk (@elonmusk) August 21, 2022
Current price will be honored for orders made before Sept 5th, but delivered later.
Full Self Driving is the name that has been given to Tesla's autonomous self-driving program. As the name implies, this is meant to be a self-driving system, however, it is not a level 3 system. Whereas, even though FSD is meant to be fully autonomous, it is not a hands-off system and requires constant monitoring by the driver.
Since this software is still considered under development, not everyone who has purchased FSD has the latest version. Only a certain number of FSD owners, who jumped through hoops, are able to be in the FSD beta program. However, once in the program, you are able to assist in the beta testing of this unfinished software.
10.69 FSD Beta Price Increase Due To Major Changes
The most recent FSD Beta update, 10.69, not only brought about a $3000 price increase to FSD, but it also skipped a couple of version numbers. Tesla CEO Elon Musk stated that there has been “major code change(s)” and a “big step(s) forward”. Among these major changes are improvements to unprotected left turns, animal and pedestrian detection, and better “creep” behavior at intersections. The FSD team also introduced the usage of occupancy networks, which has greatly increased general obstacle detection and avoidance.
What is an Occupancy Network, and how does it increase general obstacle detection?
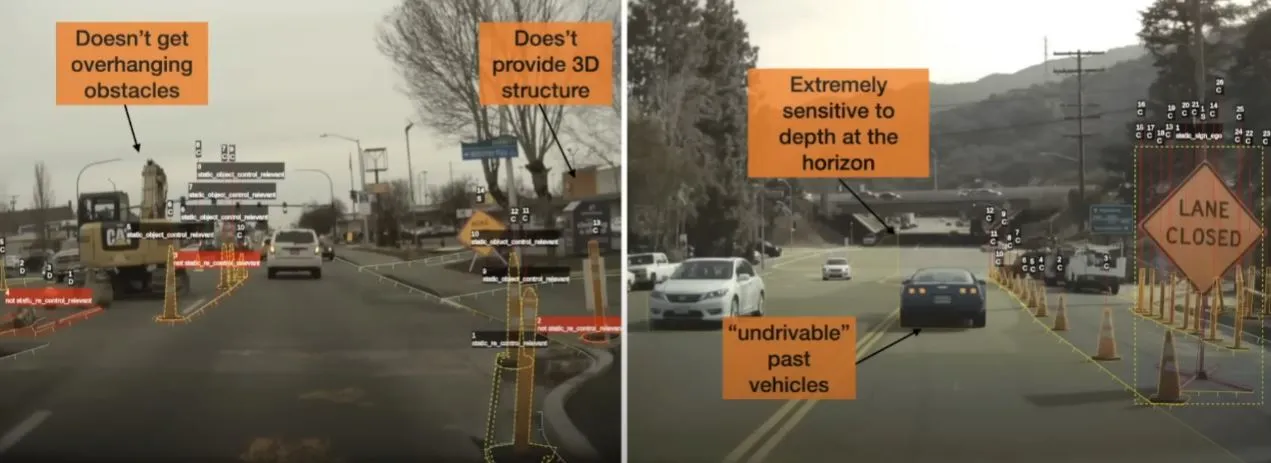
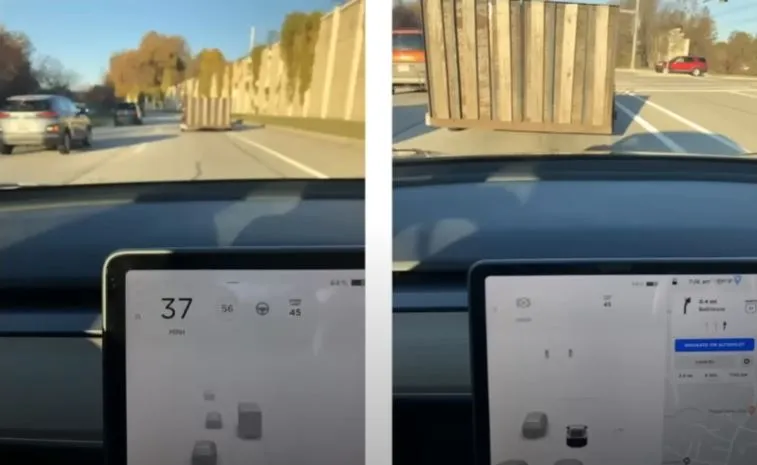
A major issue that vision-based self-driving systems have is the fact that most “images” the system processes are of a 2D space. This can lead to situations where the computer misreads something as not an obstacle, and thus does not avoid said obstacle. For example, a car parked on the side of the road, but still in the lane, would require avoidance, but is difficult for the computer to recognize when “viewing” the world through a 2D space. Or a trailer that is seemingly masquerading as a wall, as shown below.
Ashok Elluswamy, Tesla's director of autopilot software, provided a brief synopsis outlining a potential fix for this issue during a talk given at the Workshop on Autonomous Driving at CVPR 2022. He claimed that common techniques like pixel-wise depth or image-space segmentation of an open space have several flaws. That is where the occupancy network comes into play.
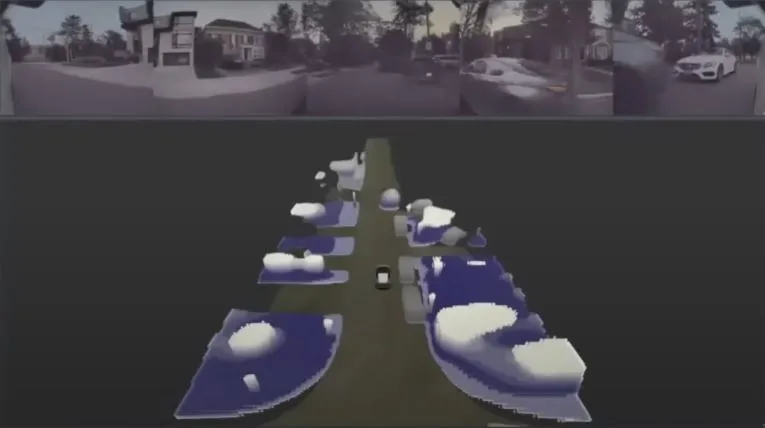
The Occupancy network attempts to “predict volumetric occupancy of all the things around the car. i.e., every voxel or continuous point in 3D space has a probability of being occupied and also its future motion,” explains Ashok. This way of processing, enables the vehicle to steer clear of any unknown objects in the area, by creating predictions based on the surrounding world and anticipating how specific things will travel.
Presented some of the recent work from the Tesla Autopilot team at CVPR this year, especially about "Occupancy Networks" - our approach to solve general obstacle detection and using it to enable sophisticated collision avoidance. Full talk here: https://t.co/wpGXlNHaWl (1/12)
— Ashok Elluswamy (@aelluswamy) August 21, 2022
Well? How Much of An Improvement Was There?
I have been a part of the beta since December 2021 or version 10.8. Although that is not since the beginning, it gives me a few versions to get an idea of how FSD operates and has improved overtime. Previously, I was on 2022.12.3.20 or 10.12.2 FSD beta. There are many times that I am blown away at what FSD is able to accomplish, but there are certain situations that are harrowing or outright dangerous. I have since updated to 2022.20.11 or FSD beta 10.69.1.1(currently have 2022.20.15 or 10.69.2 pending installation). The following are some issues I have had with 10.69.1.1 after testing it for a few days.
Unmarked Roads
I live in an area where there are a lot of unmarked roads. Most of the roads leading to my house have either very patchy lane markings or none whatsoever. I found that with previous versions of FSD, the car would stay in the middle of the lane most of the time if there were no lane markings. Even when coming up to an intersection, it awkwardly places itself in the middle of the lane which causes issues with other cars.
In 10.69.1.1 there is still much room for improvement on unmarked roads. However, I found that it became more likely that the car would align itself properly only once an intersection was being approached. Otherwise, it still had a tendency to hang out in the middle of the lane if fully unmarked. If there are any middle lane markings, then this is less of an issue.
General Lane Placement; Unnecessary Lane Changes
In most previous versions of Full Self Driving Beta, there are times when the tesla does not seem to know which lane it needs to be in and makes multiple unnecessary lane changes, causing confusion to other drivers.
In 10.69.1.1 Tesla has also added a nice UI element to lane changes and intersections that highlights the turning area in blue. Though, I did experience a seemingly better experience with lane changes in certain areas. There were still a number of times the software made awkward lane changes. For example, going out to a store, the tesla attempted to turn left in a non-turning lane, which required an overtake on my part. Although it seems to have gotten better in some areas, this is still a major problem and requires additional attention by Tesla.
Unprotected Turns Have Improved
This update had a massive changelog, and one of the core changes was focused on unprotected left turns. Specifically, on a Twitter-famous, particularly challenging unprotected left turn dubbed “Chuck Cook Style”. I personally do not have this type of turn to test, however I did find that I had fewer disengagements relating to unprotected left turns.
Improved unprotected left turns with more appropriate speed profile when approaching and exiting median crossover regions, in the presence of high speed cross traffic ("Chuck Cook style" unprotected left turns). This was done by allowing optimisable initial jerk, to mimic the harsh pedal press by a human, when required to go in front of high speed objects. Also improved lateral profile approaching such safety regions to allow for better pose that aligns well for exiting the region. Finally, improved interaction with objects that are entering or waiting inside the median crossover region with better modeling of their future intent.
Intersection “Creep” Still Not Natural Feeling
I was really hoping that intersection creeping would be vastly improved in 10.69.1.1. Fortunately, it has gotten a slightly more natural feeling. Unfortunately, though, the intersection creeping can still be road rage inducingly slow depending on visibility. If the stop sign is farther back from the intersection, the car will stop at the stop sign correctly, but since the stop sign is fairly far back it requires the Tesla to creep forward. The time it takes from the complete stop at the stop sign and then to creep forward and confirm visibility takes an unnatural amount of time. If there is a car behind me, I will often take over if that amount of time seems too long.
Verdict
The latest version of Full Self Driving Beta, 10.69.1.1, has greatly improved over previous versions in certain areas. Unprotected left turns have improved, and general smoothness has increased as well. There are still many instances where FSD is more anxiety inducing than anything, but then there are times that it handles exactly as a human would have done so.
This has been the first update in a while that has seemingly made a large stride in progress. I believe with the introduction of the occupancy network will provide the foundation to even more stable FSD beta releases in the future. I look forward to continuing to test this software and seeing it improve version over version.